Centre de Desenvolupament de Sensors, Instrumentació i Sistemes
Universitat Politècnica de Catalunya
Shaping light to your needs




Actualitat
12/09/2022
tornar
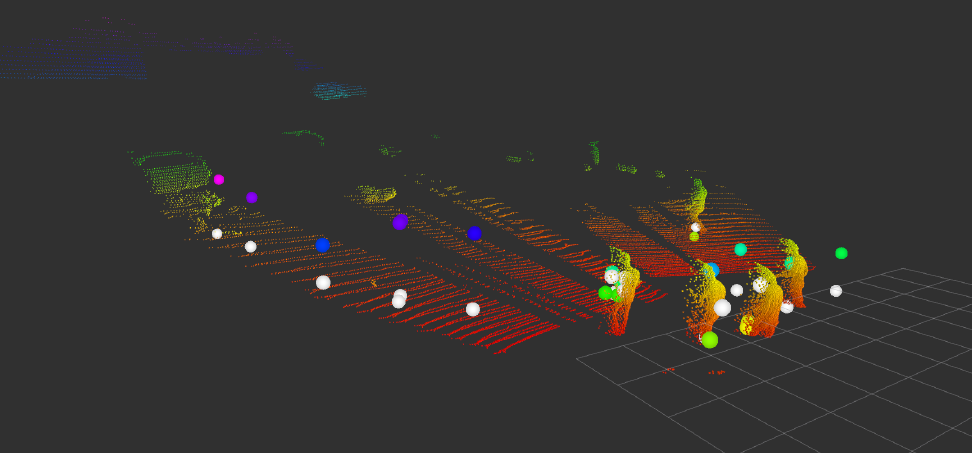


Deep Learning i fusió de sensors aplicat a medis dispersius
Els vehicles no tripulats i semiautònoms necessiten una suite de sensors completa que, almenys, necessita càmeres, lidar i radar per cobrir els seus requisits de percepció. Mentre que el costat del maquinari és avui en dia conegut a CD6, on s'integren càmeres lidar i maquinari, tota la solució necessita un programari millorat de percepció per ex. per a la detecció de vianants o amenaces a llargues distàncies. Dins d'aquest projecte nosaltres esperem començar una línia de treball al CD6 al voltant d'aspectes basats en programari de la percepció i la fusió de sensors d'imatges i núvols de punts d'alta densitat. El projecte investigarà l'ús d'una solució de càmera+lidar per a la detecció en mitjans dispersors com la boira o el fum, que és un problema d'evident rellevància i que es pot abordar mitjançant el programari utilitzant enfocaments basats en l'aprenentatge profund.Els cotxes de conducció autònoma (ADC) són un camp d'investigació en constant progrés que porta cap a més que mai cap al gran púplic, segons algunes prediccions oficials, la majoria dels cotxes s'espera que siguin totalment autònoms l'any 2035 [1]. En aquest escenari, un dels factors de seguretat a l'ADC és la detecció de vianants en diferents condicions meteorològiques i diferents circumstàncies. Per exemple, un bon reconeixement i detecció dels vianants als voltants de l'ADC és crucial per evitar possibles accidents de trànsit. L'objectiu del present treball de recerca és investigar, analitzar, proposar i desenvolupar algorismes de fusió de sensors que permeten integrar el processament d'imatges de radars i càmeres en temps real, i la detecció de llum i dades de rang basades en lidar. A més, els algorismes proposats han de ser capaços de detectar vianants en ambients amb boira i pluja. Amb aquesta finalitat, la classificació dels possibles vianants a les regions amb boira i pluja es pot implementar utilitzant l'estat de l'art dels algorismes d'aprenentatge profund.
Aquest projecte ha rebut finançament del programa de recerca i innovació Horitzó 2020 de la Unió Europea sota l'acord de subvenció Marie Sklodowska-Curie No 712949 (TECNIOspring PLUS), així com de l'Agència per a la Competitivitat de l'Empresa de la Generalitat de Catalunya
Extranet
CD6 Centre de Desenvolupament de Sensors, Instrumentació i Sistemes
Rambla de Sant Nebridi, 10 · 08222 · Terrassa (Barcelona)
Rambla de Sant Nebridi, 10 · 08222 · Terrassa (Barcelona)